آموزش گام به گام رباتیک

آموزش گام به گام رباتیک
قسمت اول
از کجا شروع کنیم؟؟
ه نظر بنده ورود به عرصه رباتیک مشکل ترین مرحله می باشد به طور کلی رباتیک رشته ای میان رشته ای است با ترکیبی از رشته های مهندسی برق گرایشات الکترونیک و کنترل ، مهندسی مکانیک گرایش طراحی جامدات و مهندسی کامپیوتر گرایش نرم افزار.
در ایران این رشته در مقطع کارشناسی ارشد، مکاترونیک نام دارد که معمولا مورد توجه دانشجویان رشته برق ، کامپیوتر و مکانیک قرار می گیرد.
رشته رباتیک قبل از رشته مکاترونیک تدرس خود را شروع کرده به طوری که رشته مهندسی رباتیک در سال ۱۳۸۱ در مقطع کارشناسی توسط دانشگاه صنعتی شاهرود وارد ایران شد. اما آموزش رشته مکاترونیک از سال ۱۳۸۳ در ایران شروع شد.
واضح است زمانی که می خواهید به مقوله رباتیک بپردازید باید به بخش هایی از این ۳ رشته بپردازیم در حالت کلی رباتیک را به ۲ بخش شبیه سازی (Simulation)، و ربات حقیقی (Real) تقسیم بندی می کنند. در شبیهسازی در حقیقت رباتی به صورت فیزیکی ساخته نمیشود و ساخت ربات در یک محیط مجازی شبیه سازی شده که در آن بعضی از قوانین دنیای واقعی وجود دارد صورت میگیرد هدف از برگزاری و کار بر روی این قسمت بیشتر کار بر روی هوش ربات ( یا همان مقوله هوش مصنوعی) می باشد. در این بخش مسابقاتی در رشته های «شبیه سازی امداد و نجات» (Rescue Simulation) و «شبیه سازی فوتبال» (Soccer Simulation) و… هرسال در جهان برگزار میشود. در بخش Real مسابقات بسیار متنوعتری نسبت به Simulation وجود دارد زیرا شما با ربات های حقیقی سر و کار دارید که مهمترین آنها عبارتند از: رباتهای فوتبالیست(در چندین سطح مختلف)، رباتهای امدادگر، رباتهای مسیریاب (Path Finder)، رباتهای آتش نشان (Fire Fighter)، ربات های مین یاب (Deminer)، رباتهای لابیرنت، رباتهای انسان نما (Humanoid)، سگها (Four legged Robot)، ربات های خانگی(At home) و… البته واضح است که ساخت ربات واقعی علاوه بر مشکلات متعددی که داراست دارای هزینه های بالاتری نیز می باشد.

یک نوع دیگر از تقسیم بندی ربات جهت کنترل که بسیار متداول تر می باشد:
۱٫ کنترل غیر قابل بازخورد یا فیدبک(Non-Servo control) این نوع از کنترل ساده ترین نوع کنترل است که در حقیقت فیدبکی از خروجی به ورودی برگردانده نمی شود یک مثال خیلی ساده از مدار و یا سیستم بدون فیدبک می توان به ماشین لباسشویی اشاره کرد که تمیز یا کثیف بودن لباس ها چک نمی شود و تنها سیستم یک عمل خاص را در یک زمان خاص انجام می دهد
کنترل غیر قابل فیدبک خود بر دو نوع است
• کنترل ایست مکانیکی(Mechanical stop control): در این روش حرکت ربات توسط مانعی که آن را ایست (stop) می نامند معین می شود
• کنترل نقطه به نقطه (Point-to- point Control): در این روش که در رباتهای هیدرولیک به کار می رود بدین صورت است که با کنترل کردن مقدار روغن داخل پمپ در بازوی ربات به اندازه ای که خواسته شده ربات حرکت می کند و کنترل می شود
۲٫ کنترل قابل بازخورد یا فیدبک (Servo-Control): در این نوع از کنترل ما می توانیم بدون استفاده از ایست مکانیک ها ربات را متوقف کنیم این مدار یک مدار بسته است اگر بخواهیم مثالی از آنچه در زندگی روزمره با آن سر و کار داریم داشته باشیم می توان به کنترل کننده های دما اشاره کرد که مثلا شما در تابستان دما را بر روی ۳۵ درجه قرار می دهید زمانی که دما بالای ۳۵ درجه برود کولر روشن شده و دما را کاهش می دهد زمانی که دما زیر ۳۵ درجه رفت خاموش می شود این یک سیستم مدار بسته است که ورودی بازخورد خروجی است که ( خروجی دمای بیرون است) البته این روش دارای ایرادی است که آن خاموش و روشن شدن مرتب فن می باشدچون ممکن است مثلا پس از ۳ دقیقه روشن شدن فن دما پایین آید پس هر ۳ دقیقه یکبار فن روشن و خاموش می شود برای جلوگیری از این مشکل که سبب استهلاک و خرابی زودرس دستگاه ها می شود یک بازه تعریف میکنند مثلا دما اگر زیر ۳۰ بود فن خاموش شود و زمانی که بالای ۳۷ بود روشن گردد
کنترل با فیدبک نیز به دو صورت اتفاق می افتد
• کنترل نقطه به نقطه (Point-to- point Control)
• کنترل مسیر پیوسته(Continue path control)
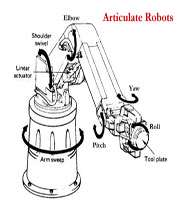
۱٫ اندام های مکانیکی ربات: که شامل بازوهای پیوسته که به صورت لولا به هم متصلند و این مفصل ها به دو صورت عمل می کنند
• دورانی (Revolute )
• منشوری (Prismatic)
هر مفصل و بازو یک درجه آزادی را تشکیل می دهند (Degree of freedom)
در نتیجه اگر شما مثلا n مفصل و n بازو داشته باشیم n درجه آزادی خواهیم داشت این بازوها به بازویی که ربات به وسیله آن به جایی نصب شده متصلند این بازو به بازوی صفر مشهور است و جزء بازو های ربات محسوب نمی شود و در حرکت ربات تاثیری ندارند و به جایی مثلا زمین متصل هستند و توسط این پایه است که مختصات اولیه ربات را می سنجیم این مختصات اولیه به مختصات جهانی معروف است (World coordinate) نحوه شماره گذاری بازوها از بازوی پایه آغاز می شود تا به بازوی انتهایی ادامه می یابد نکته حائز اهمیت آن است که هیچگاه یک ربات یک مدار بسته را تشکیل نمی دهد
۲٫ نیرو محرکه یا راه انداز(Actuator): تولید کننده قدرت و نیروی ربات است که توسط یک کنترل کننده دقیق به کنترل مفصل ها و بازوهای ربات می پردازد که خود شامل ۳ نوع می باشد:
• پنوماتیک یا سیستم بادی ( Pneumatic system):
• هیدرولیک یا سیستم روغنی (Hydraulic System)
• سیستم برقی یا الکترونیک سیستم (Electronic System)
هر یک از این سه قسمت به طور مفطل توضیح داده خواهند شد
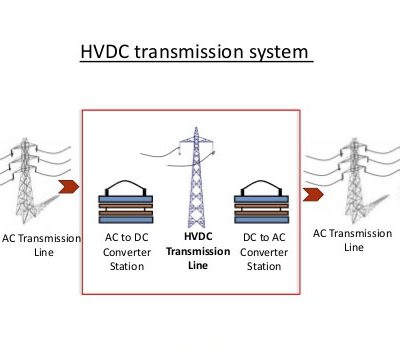
۳٫ سیستم انتقال نیرو (Transmission system): واسطه ای بین سیستم اندام های مکانیکی و نیرو محرکه است که از محل تولید آن را به یکی از اندام ها منتقل می کند
۴٫ سنسور یا حسگر(Sensor): حکم چشم ربات را دارند که شامل انواع برقی و نوری و …. می باشند
۵. دستگاه کنترل یا کامپیوتر ربات (The robot Controller or computer) : در واقع برتری یک ربات از روی سیستم کنترل و میزان هوشمندی آن قابل ارزیابی است
نام فایل: آموزش گام به گام رباتیک
مشاهده کامل مطلب: لینک به تالار گفتگو












قوانین ارسال دیدگاه در سایت