پروژه تحلیل سینماتیک ربات های اسکارا به کمک نرم افزار آدامز که پروژه درس دینامیک ماشین می باشد و در زمستان ۱۳۸۸ در دانشگاه چمران اهواز تهیه شده است را با فرمت Word در ۱۶ صفحه از لینک داده شده می توانید دانلود کنید.
چکیده پروژه:
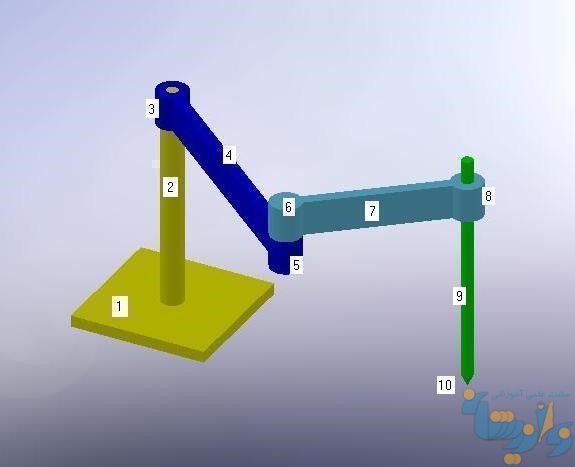
در این گزارش مختصری به معرفی ربات های SCARA و نرم افزار MD.ADAMS پرداخته شده و سپس با بکارگیری سینماتیک مستقیم و معکوس ربات های نام برده توسط نرم افزار ADAMS/view و انجام چند مثال روشی حاصل شده است که به کمک آن می توان موتورهای ربات را طوری هدایت کرد که بازوها ی ربات روی مسیر دلخاه و مورد نیاز کاربر با سرعت مشخص حرکت کنند و عملیات مورد نظر کاربر را انجام دهند . بدین منظور ابتدا به ساخت یک مدل ساده از ربات SCARA در نرم افزار ADAMS/view پرداخته شده و سپس با اعمال سینماتیک مستقیم با حرکت دلخاه کاربر (با ذکر سه مثال) جداول داده های حاصل از وضعیت مفاصل مختلف ربات بر حسب زمان ذخیره گردیده است .آنگاه با بکارگیری سینماتیک معکوس موتور های ربات مقید شده اند که بر اساس داده های حاصل از سینماتیک مستقیم حرکت کنند . و به این ترتیب ربات مطابق میل کاربر حرکت خواهد کرد .
کلمات کلیدی : ربات SCARA ، نرم افزار ADAMS ، سینماتیک مستقیم ، سینماتیک معکوس
فهرست مطالب پروژه تحلیل سینماتیک ربات های اسکارا به کمک نرم افزار آدامز :
- چکیده ی گزارش
- ربات های SCARA
- نرم افزار ADAMS/view
- ساخت یک مدل ساده از ربات
- حرکت روی خط مستقیم
- حرکت روی مسیر دایره ایی
- حرکت روی مسیر مربعی
- نتیجه گیری و روش کلی
- پیوست
- منابع
نام فایل:تحلیل سینماتیک ربات های اسکارا به کمک نرم افزار آدامز
دانلود فایل: لینک مستقیم
پسورد: www.noandishaan.com
آموزش نرم افزار Adams به صورت تصویری در قالب ۲ دی وی دی آموزشی همراه با نسخه های قابل نصب ورژن ۲۰۱۴، ۲۰۱۶ و ۲۰۱۷ MSC Adams و فایل پروژه های تدریس شده را از لینک زیر می توانید تهیه نمایید: