چکیده:
با پیشرفت روز افزون علم و فناوری همواره نیاز های جدید به وسایل و دستگاه های جدید تر جهت هماهنگی همه بخشهای صنعت با این پیشرفت ، به وجود می آیند. بدین منظور شناخت و طراحی راه کارها و وسایل جدید امری است اجتناب ناپذیر.از جمله این پیشرفت ها ساخت نوع جدید و پیشرفته تری از موتورهای الکتریکی به نام استپ موتور ها یا موتورهای پله ای است که با کاهش انواع هزینه ها در صناع کم کم جای مکانیزم های پیچیده مکانیکی را خواهند گرفت.در این مقاله سعی شده است تا بسیار مختصر و متناسب با محدودیت ها بزبانی ساده و قابل درک ساختار و نحوه کارکرد و کنترل موتورهای استپی بررسی و بیان شود.
مقدمه:
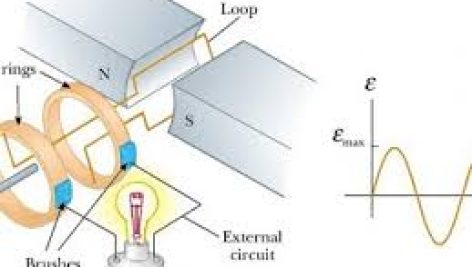
با درک میدان های مغناطیسی و کشف آنکه می توان انرژی الکریکی را به انرژی مکانیکی تبدیل نمود تحولی عظیم در تاریخ بشری بوجود آمد ، بگونه ای که بشر روز به روز به تفکر و طراحی و ساخت وسایلی که بتوانند با استفاده از انرژی الکتریکی ، انرژی مکانیکی تولید نمایند روی آورد. از این رو انواع موتور های الکتریکی به صحنه وجود آمده و همچنان سیر تکمیلی خود را طی نمودند تا به امروز که می توان برای هر نوع کاربری ، نوع خاصی از موتورها را بکار برد. اما ساخت اسپ موتور با امکاناتی که به طراحان و سازندگان ماشین آلات میدهد ، به گونه ای برجسته سبب کاهش هزینه ها در همه زمینه ها می شود. یکی از چندین مزایای بسیار زیاد این نوع الکتروموتورها تبدیل مکانیزم های بسیار پیچیده مکانیکی ، به تنها یک محرک استپی می باشد. در ادامه با این پدیده جالب آشنا تر خواهیم شد.
استپ موتور یا موتور پله ای
یک استپ موتور وسیله ای الکتریکی است چرخش زاویه ای گسسته یا پله ای دارد و با اتصال به ضربان هایی در فرکانسی خاص کار می کند. هر ضربان فرستاده شده به موتور سبب حرکت محور موتور تا زاویه ای معین می شود که این زاویه ، زاویه استپینگ (Stepping Angle) نامیده می شود.
شکل ۱ ساختمان ساده شده یک استپ موتور “Bifilar” مگنت دائمی را نشان می دهد.
روتور از جنس آهنربای دائمی است و شش دندانه دارد که با فاصله های مساوی و یک در میان در قطب های N و S اطراف روتور قرار دارند.استاتور چهار قطب دارد که هر قطب دارای پیچه ای است که این پیچه از مرکز خروجی V را داراست.
پیچه های روی قطب های مختلف به هم وصلند بطوری که فقط پنج سیم A , B , C , D & +V از موتور خارج می شوند.پیچه با ارسال جریان به سیم +V و خروج آن از یکی از سیمهای دیگر فعال می شود.
سیم پیچ ها در دندانه های استاتور به روشی پیچیده می شوند به طوریکه نتایج زیر حاصل می شود :
اگر سیم B فعال باشد ، قطب ۱ شمال و قطب ۲ جنوب خواهند بود و اگر سیم A فعال باشد قطب ۱ جنوب و قطب ۲ شمال می شود.
اگر سیم C فعال باشد قطب ۳ شمال و قطب ۴
جنوب و اگر سیم D فعال باشد قطب ۳ جنوب و در عوض قطب ۴ شمال خواهند بود.
عملکرد استپ موتورها براساس این قانون است که وقتی قطبهای مشابه دفع می شوند ، قطبهای مخالف جذب می شوند. اگر سیم پیچ ها در توالی صحیح فعال باشند روتور در مسیر و جهتی معین خواهد چرخید.
شکل ۲ نشان می دهدکه روتور هنگامی که پیچه ها با توالی داده شده در جدول ۱ فعال اند چگونه می گردد.
همانطور که در شکل ۲ مشاهده می شود ، ترتیب القاهای داده شده در در جدول ۱ سبب چرخش روتور در جهت عقربه های ساعت می شود.
اگر توالی این القا ها معکوس شود ، جهت حرکت نیز معکوس می شود.
اگر حتی همه القا ها متوقف شده و هیچ جریانی به موتور وارد نشود ، به علت وجود آهنرباهای دائمی در روتور بازهم مقداری جاذبه میان قطب ها و دندانه ها وجود دارد. از این رو حتی هنگامی هم که هیچ تغذیه ای به موتور متصل نیست ، بازهم قدری ((گشتاور نگه دارنده)) در موتور باقی می ماند.
از شکل ۲ می توان مشاهده نمود که موتور زاویه استپینگ یا زاویه مرحله ۳۰ درجه دارد و برای کامل کردن یک چرخه به ۱۲ استپ یا مرحله نیاز دارد. تعداد مرحله ها در هر دور در یک موتور استپی با اضافه کردن دندانه های بیشتر روی روتور می تواند افزایش یابد و با اضافه کردن دندانه هایی به دندانه های استاتور ، زاویه استپینگ یا زاویه طی مرحله یک موتور استپی را می توان تا حد ۱٫۸ درجه کوچک کرد به طوری که برای طی یک چرخه دویست مرحله نیاز باشد.
برنامه القای پیچه ها در شکل ۲ به القای تک فاز معروف است ; از آنجا که در هر زمان فقط یکی از چهار پیچه فعال است.
در هر مرحله دندانه های روتور دقیقا رد مقابل دندانه های فعال استاتور قرار می گیرند. با این حال راه اندازی موتور با دو پیچه حامل جریان در یک زمان امری ممکن است (القای دو فازی). در این حالت دندانه های روتور خود را در میان دوتا از دندانه های فعال استاتور قرار می دهند. جدول ۲ برنامه کاری و موقعیت روتور را برای القای دو فاز و تک فاز نشان می دهد.توجه داشته باشید که زاویه مرحله یا همان Stepping Angle برای دو نوع القا یکی است بجز اینکه موقعیت های روتور با نصف زاویه مرحله تعیین می شوند.
اگر القای تک فاز و دو فاز با هم ترکیب شوند ، یک حالت نیم مرحله (Half Step mode) حاصل می شود. در این حالت تعداد مراحل یا استپ ها در هر چرخه دو برابر است ; به طوری که اگر موتوری در حالت مرحله کامل یا Full – Step برای کامل کردن چرخه به دویست دور نیاز داشته باشد ، در حالت نیم مرحله یا Half – Step به چهارصد دور برای تکمیل آن نیاز دارد. جدول ۳ توالی کارکرد برای حالت نیم مرحله نشان می دهد.
استپ موتوری که در بالا شرح داده شد از دو پیچه با در مقابل هم قرار دادن مگنت های همنام در هر قطب استفاده می کند. به این دلیل است که این نوع ، استپ موتور “Bifilar” نامیده می شود.
نتیجه گیری
کارایی و امکانات یک استپ موتور بسیار بیشتر از انواع دیگر الکترو موتورها می باشد. بدین لحاظ که بسیاری مکانیزم ها و حالات مختلف چرخش را می توان از آنها گرفت و همچنین این که کنترل این موتور ها بسیار آسان تر از سایرین است به طوری که عمدتا به وسایل کنترل سرعت اضافی از قبیل ترمز های الکتریکی و مکانیکی نیازی ندارند.
پس بر ماست تا با افزایش دانش خود در مورد این نوع کارامد از موتورهای الکتریکی سعی در استفاده هرچه بیشتر از امکانات آنها کنیم.
نویسنده : عباس صمیمی فر