مسئله مکان یابی و تهیه نقشه همزمان در محیط مجهول توسط یک ربات متحرک به SLAM یا CML مشهور است. هدف SLAM تهیه نقشه از یک محیط ناشناخته و بدون اطلاعات قبلی از محیط و با استفاده از اطلاعات بدست آمده از سنسورهای ربات متحرک میباشد، در عین حال با استفاده اطلاعاتی که ربات در اختیار دارد موقعیت ربات را در آن محیط محاسبه کند.
مسئله به دست آوردن مکان خود ربات را مسئله مکان یابی و مسئله به دست آوردن توصیفی از محیط را مسئله ایجاد نقشه می نامیم. به توصیف بدست آمده از محیط، نقشه گفته میشود. حل مسئله مکان یابی نیاز به استفاده از نقشه محیط دارد، چرا که اگر ربات دانش کافی در رابطه با نقشه محیط داشته باشد با توجه به مشاهده ای که در هر لحظه از محیط انجام می دهد و تطبیق آن مشاهده با نقشه موجود می تواند مکان خود را تخمین بزند.
در عمل عموما مدل دقیقی از محیط در دست نیست، یا اغلب قرار است ربات در محیط های مختلف و ناشناخته کار کند. بنابراین نیاز داریم که نقشه ای از محیط توسط خود ربات و مشاهداتی که از محیط دارد، ایجاد شود. در همین راستا مشکل دوم بروز میکند، چرا که برای ایجاد نقشه نیاز به اطلاعات دقیق از مکان ربات داریم. به همین علت است که از این مسئله در مقالات علمی به عنوان مسئله “مرغ و تخم مرغ” هم یاد می شود. چرا که برای مکان یابی به نقشه نیاز داریم و برای ایجاد نقشه به مکان ربات، مکان یابی صرف با فرض وجود نقشه فرآیندی نسبتا سرراست و قابل حل است، از طرف دیگر ایجاد نقشه صرف هم با وجود اطلاعات دقیق از مکان ربات مسئله ای با راه حلی سرراست است. اما حل این دو مسئله به صورت همزمان و بدون اطلاعات اولیه از محیط، کاری دشوار می نماید.
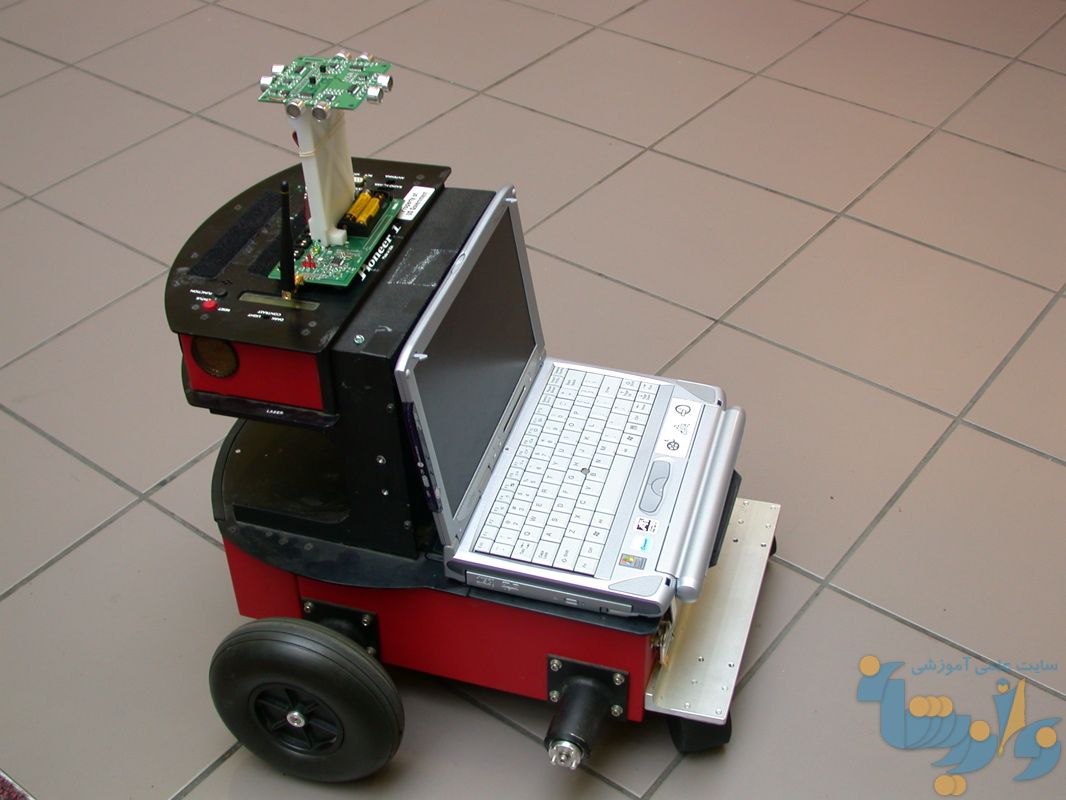
از آنجا که سنسورهای ربات متحرک و حرکت ربات دارای عدم قطعیت هستند، تخمین مکان ربات و استخراج نقشه به صورت همزمان چندان ساده نخواهد بود. بنابراین بایستی نحوه پردازش اطلاعات سنسورها را با در نظر گرفتن نوع محیط کاری به دقت مورد بررسی قرار داد. برای رسیدن به دقت و کارایی مناسب در حل این مسئله سنسورهای مورد استفاده بر روی ربات ها با توجه به محیط و دقت مورد نظر متفاوت می باشند. به عنوان مثال می توان ادعا کرد که استفاده از دوربین در محیط های زیر آب استفاده چندانی ندارد و یا از نظر دقت لیزر اسکنر از سنسور سونار دقیق تر میباشد.
در مجموع علت توجه به مسئله SLAM در تحقیقات علمی عدم قطعیت موجود در این مسئله می باشد و بیشتر محققان به دنبال روش هایی هستند که به ساده ترین صورت ممکن عدم قطعیت مکان ربات و نقشه تهیه شده توسط ربات را به حداقل برسانند. البته برخی از ایده های مطرح شده در SLAM را برای کاهش عدم قطعیت، در دیگر مسائلی که با عدم قطعیت درگیر هستند می توان استفاده کرد.
منبع: نواندیشان