با توجه به گستردگی و اهمیتی که مدارات فرمان در صنایع مختلف دارا میباشند در این نرمافزار سعی شدهاست تا کلیاتی راجع به مدار فرمان برق به صورت علمی و کاربردی ارائه شود. معرفی تجهیزات مورد استفاده در مدار فرمان، نحوه کارکرد آنها، اینترلاکها، نکات مورد نیاز در بهرهبرداری، عیبیابی و… نمونهای از مباحثی است که در بخشهای مختلف نرمافزار بدان پرداخته میشود.
فهرست مطالب آموزش مدار فرمان برق :
۱- مقدمه
۲- اجزاء مدار فرمان
۲-۱- کنتاکتور
۲-۲- رلهها
۲-۳- رله حرارتی یا بیمتال
۲-۴- تایمرها
۲-۵- کنترل فاز
۲-۶- کلیدهای تابع
۲-۷- لیمیتسوئیچها
۲-۸- فیوزها
۲-۹- کلیدهای انتخابگر
۲-۱۰- شستیها
۲-۱۱- لامپ سیگنال
۲-۱۲- سایر تجهیزات مدار فرمان
۳- نحوه کارکرد مدارات فرمان
۴- اینترلاکها و اینترتریپها
۵- نقشههای مدار فرمان
۶- بهرهبرداری از تابلوهای فرمان
۶-۱- رعایت نکات ایمنی
۶-۲- بازرسی، سرویس و نگهداری
۶-۳- تمیزکاری
۷- عیبیابی مدارات فرمان
۸- تابلوهای کنترل موتورهای الکتریکی یا MCC
۸-۱- کلیات
۸-۲- راهاندازی موتورهای القایی
۸-۳- کنترل دور موتورها
۸-۴- ترمز
۸-۵- تغییر جهت گردش
۹- مقدمهای بر سیستمهای کنترل جدید
۹-۱- کنترلکنندههای منطقی برنامهپذیر
۹-۲- سیستمهای DCS و FCS
۹-۳- مخابرات در سیستمهای کنترل
توضیحات درباره مدار فرمان برق :
در مدارات فرمان از تجهیزات و اجزاء بسیاری استفاده میشود که از آنها میتوان به کنتاکتورها، رلهها، تایمرها، شستیها، کنترلفازها، لیمیتسوئیچها و … اشاره کرد.
کنتاکتور :
کنتاکتورها در واقع ارتباط دهنده بین مدارات کنترل و قدرت بوده و در گروههای کاری مختلفی ارائه میشوند.
استاندارد IEC کنتاکتورها را بسته به کاربرد و محل استفاده به دستههای مختلفی تقسیم میکند که هم کنتاکتورهای AC و هم DC را در بر میگیرد. مهمترین این گروهها در ولتاژهای AC گروههای AC3، AC4 و AC11 هستند. در کنتاکتورهایی که برای قطع جریانهای خازنی طراحی شدهاند، از یک شاخه مقاومتی به موازات هر کنتاکت استفاده شده که در لحظه وصل ابتدا این شاخه وصل شده و پس از کنترل جریان کنتاکتهای اصلی کنتاکتور بسته میشوند. پس از وصل کنتاکتهای اصلی، شاخه مقاومتی از مدار خارج میشود.
این نوع از کنتاکتورها در بانکهای خازنی که برای بهبود ضریب توان در شبکه نصب میشوند، استفاده میشوند.
رله :
رلهها از لحاظ اساس کار و ساختمان بسیار شبیه کنتاکتورها بوده با این تفاوت که ابعاد آنها به مراتب کوچکتر بوده و از آنها تنها در مدارات کنترل و فرمان استفاده میشود. به طور کلی این رلهها را می توان به دو دسته نگهدار و غیر نگهدار تقسیم کرد. در انواع غیر نگهدار یا Non-Latching، در حالت عادی کنتاکتهای رله باز بوده و با اعمال ولتاژ به بوبین یا کویل آن بسته میشوند. در صورت برداشته شدن ولتاژ از روی بوبین، کنتاکتها بلافاصله به حالت اول برگشته و دوباره باز میشوند ولی در انواع نگهدار یا Latching با برداشته شدن ولتاژ از روی بوبین، کنتاکتهای رله در وضعیت خود باقی مانده و تغییری نمیکنند
تایمر :
تایمرها یا رلههای زمانی تجهیزاتی شبیه رلهها هستند با این تفاوت که پس از اعمال ورودی فرمان به آنها و به عبارت دیگر برقدار کردن بوبین آنها بلافاصله عمل نکرده و بلکه عملکرد آنها پس از مدتزمانی که اغلب بر روی رله قابل تنظیم است، صورت میگیرد.
برخی از این فانکشنهایی که معمولا در تایمرها در نظر گرفته میشوند به شرح ذیل میباشد:
۱-تأخیر در وصل پس از وصل تحریک یا On-Delay:
در این فانکشن، با وصل برق به بوبین تایمر یا ورودی کنترل آن، پس از مدت زمانی که روی تایمر تنظیم شدهاست کنتاکتهای باز تایمر بسته و کنتاکتهای بسته آن باز میشود.
۲- تأخیر در قطع پس از وصل تحریک یا On Pulse:
در برخی از حالات ممکن است پس از وصل تحریک تایمر، کنتاکتها تغییر وضعیت داده و پس از گذشت زمان تنظیمی، کنتاکتها به حالت قبلی خود برگردند.
۳- تأخیر در قطع پس از قطع تحریک یا Off-Delay:
در این فانکشن با برداشته شدن تحریک از روی بوبین تایمر یا تغییر در وضعیت ورودی کنترل آن، کنتاکتهای آن برای مدت زمان تنظیمی، بدون تغییر باقیمانده و سپس عمل میکنند. تایمرهایی که دارای این نوع فانکشن هستند، اغلب دارای تغذیهای مجزا از تحریک خود هستند.
۴- قطع و وصل متناوب یا Recycling On/Off:
در این حالت پس از تحریک تایمر، کنتاکتهای آن به طور متناوب و در فاصلههای زمانی تنظیم شده بسته و باز میشوند. زمان باز و بسته بودن کنتاکتها در این حالت ممکن است متفاوت و قابل تنظیم باشد. این فانکشن نیز برای اجرا، به منبع تغذیهای مجزا از تحریک تایمر احتیاج دارد.
شستی :
شستیها، کلیدهایی هستند که به صورت دستی وصل یا قطع شده و پس از برداشته شدن تحریک دوباره به حالت اولیه خود برمیگردند. رنگ شستیها معمولا بر حسب کاربرد آن شستی انتخاب میشود. به عنوان مثال در مدارات فرمان، شستی استارت اغلب به رنگ سبز و یا مشکی و شستی استپ به رنگ قرمز در نظر گرفته میشود. رنگ زرد نیز ممکن است در مواقعی که وسیلهای بر خلاف حالت نرمال خود راهاندازی میشود به کار رود. از این موارد میتوان به راهاندازی موتور در خلاف جهت نرمال خود اشاره کرد. رنگهای سفید و آبی نیز ممکن است برای مقاصد مختلف در مدارات فرمان به کار گرفته شوند.
تجهیزات حفاظتی :
بسیاری از تجهیزاتی که در یک محیط صنعتی، به کار گرفته میشوند از نظر عملکرد وابسته به هم بوده و از این رو در مدارات کنترل آنها باید این وابستگی لحاظ شود. معمولا ارتباط بین این تجهیزات تحت عناوینی مانند اینترتریپ، اینترلاک و …. بیان میشود. به عنوان مثال در یک شبکه الکتریکی، ممکن است با قطع کلید بر اثر خطا، لازم باشد جهت ایمنی بیشتر پرسنل یا تجهیزات، کلید بالادست نیز بلافاصله قطع شود. از این رو بین این دو کلید از نظر مدار فرمان ارتباطی وجود داشته که اغلب تحت عنوان اینترتریپ بیان میگردد.
اینترلاکها نیز نوعی از تجهیزات و تمهیدات حفاظتی هستند که روال انجام کارها توسط پرسنل را مونیتور کرده و محدودیتهایی را برای ترتیب انجام کارها اعمال میکنند. پارهای از این اینترلاکهای الکتریکی که ممکن است در تابلوهای مربوط به موتورهای الکتریکی وجود داشته باشد را می توان به این شرح نام برد:
۱٫ تا وقتی کلید در مدار است هیتر داخل پانل روشن نمیشود. این هیتر موقع قطع بودن کلید روشن شده و مانع کندانس شدن آب در داخل عایق کلید میشود.
۲٫ دو کلید مربوط به موتور الکتریکی و یدکی آن نمیتوانند به طور همزمان وصل باشند.
وقتی خطایی باعث قطع کلید شد، تا رله مربوطه ریست نشود نمیتوان کلید را وصل کرد.
انواع نقشه ها در مدارات فرمان :
از مهمترین انواع نقشه که در مدارات فرمان استفاده میشود، نقشه مسیر جریان شامل ۲بخش مدار قدرت و فرمان است.
در این نقشهها، معمولا موارد زیر رعایت میشود که باید به آنها توجه کرد:
۱٫وضعیت کلیه کنتاکتها و اجزای نشان داده شده در مدار مربوط به حالتی است که مدار تحریک نشده و به عبارت دیگر حالت قبل از راهاندازی است.
۲٫کد هروسیله درسمت چپ نشانه اختصاری آن و اغلب بر روی خود وسیله در مدار فرمان نیز نوشته میشود.
۳٫ شمارهگذاری ورودیهای کنتاکتورها و بی متالها درمدار قدرت با اعداد ۱،۳،۵ و خروجی آنها با اعداد ۲،۴،۶ میباشد.
۴٫ مسیرهایی که در نقشه با هم تلاقی پیدا میکنند، در صورتی که با هم اتصال داشته باشند، در محل اتصال از یک نقطه پررنگ استفاده می شود و در غیر این صورت این مسیرها با هم تلاقی ندارند.
۵٫ خط چین های موجود در نقشه، مربوط به ارتباط مکانیکی تجهیزات بوده که از این موارد میتوان به ارتباط کنتاکتهای پوشباتنها، اینترلاکها و… اشاره کرد.
در زیر مسیرهای جریان که در آن بوبین یک وسیله قرار دارد، معمولا جداولی رسم میشود که مشخص میکند کنتاکتهای مربوط به آن کنتاکتور، در کدام مسیر جریان قرار دارد. مسیر جریان معمولا در داخل پرانتز نوشته میشود.
راهاندازی و کنترل موتورهای الکتریکی :
راهاندازی و کنترل موتورهای الکتریکی، اغلب باید تحت شرایط خاص و با لحاظ کردن پارهای از نکات مهمدر بهرهبرداری از آنها صورت گیرد. به همین منظور در اغلب موارد تابلوهایی که برای قطع و وصل و نیز کنترل موتورهای الکتریکی به کار برده میشوند، دارای قابلیتهای متفاوتی هستند. این تابلوها MCC یا Motor Control Centre نامیده میشوند. در این تابلوها کنترل دور موتور، راهاندازی، ترمز، تغییر جهت گردش آن و… میتواند با استفاده از روشهای متداول کنتاکتوری و یا با استفاده از روشهای جدید صورت گیرد. روشهای جدید عمدتا بر پایه الکترونیک قدرت استوار بوده و تجهیزاتی مانند راهاندازهای نرم و درایورها از بارزترین آنها هستند. در هنگام راهاندازی یک موتور القایی، همواره جریان بسیار زیاد و گذرایی از درون سیمپیچیهای موتور میگذرد که باعث اعمال تنشهای شدید در لحظه راهاندازی یک موتور میشود که دوام آنها میتواند از طول عمر یک موتور بکاهد.
به طور کلی برای راهاندازی یک موتور، روشهای مختلفی استفاده میشود که میتوان به موارد ذیل اشاره کرد:
۱٫راه اندازی مستقیم
۲٫ روش ستاره-مثلث
۳٫ روش استارت نرم
۴٫ روش فرکانس متغیر
برای کنترل دور موتورها، روشهای مختلفی وجود دارد که بسته به نوع کاربرد موتور و نیز محدوده مورد نیاز برای سرعت، یکی از این روشها اقتصادیتر است. معمولترین روش هایی که برای کنترل سرعت موتورهای القایی به کار برده میشود، به این شرح است:
۱٫ تغییر اندازه ولتاژ اعمالی به موتور
۲٫تغییر تعداد قطبها
۳٫ تغییر مقاومت رتور
۴٫ تغییر فرکانس ولتاژ
با قطع تغذیه یک موتور، گشتاور تولیدی موتور صفر شده و شافت موتور با اینرسی مربوط به بار به حرکت خود ادامه میدهد. بر اثر تلفات انرژی مربوط به نیروهای مقاوم نظیر اصطکاک، این حرکت کمکم میرا شده و موتور متوقف میشود. در بسیاری از کاربردها، ممکن است این نوع توقف کنترل نشده موتور چندان مطلوب نباشد و از این رو باید از روشهایی استفاده کرد که بتوان موتور را در مرحله توقف نیز کنترل کرد.
روشهایی مختلفی برای انجام این کار وجود دارد که برخی از آنها را می توان بدینگونه نام برد.
۱٫ تغییر توالی فازها
۲٫ اعمال جریان مستقیم
PLC :
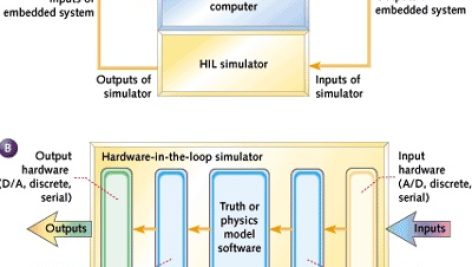
کنترلکنندههای منطقی برنامهپذیر و به عبارت دیگر PLCها، در واقع کامپیوترهای کوچکی هستند که برای کنترل بسیاری از امور در محیطهای صنعتی به کار گرفته میشوند. در این تجهیزات به جای استفاده از رلهها و قطعات مکانیکی، از قطعات الکترونیکی و با استفاده از نرمافزار، مدارات فرمان پیچیده و بزرگ پیادهسازی میشوند. یک PLC از نظر سختافزاری از اجزاء مختلفی تشکیل شده است که این اجزاءاغلب به صورت ماژولهای مجزایی بوده که در کنار هم قرار میگیرند.
از این ماژولها میتوان به موارد زیر اشاره کرد:
۱- منبع تغذیه یا Power Supply
۲- واحد پردازش مرکزی یا CPU
۳- کارت حافظه که ممکن است بر روی ماژول مربوط به CPU نصب شود.
۴- کارتهای ورودی دیجیتال
۵- کارتهای ورودی آنالوگ
۶- کارتهای خروجی دیجیتال
۷- کارتهای خروجی آنالوگ
کنترلکنندههای منطقی، مبنای کار سیستمهای پیشرفته کنترلی نظیر DCS و FCS هستند. در سیستم DCS یا Distributed Control System، یکبخش مرکزی که کلیه امور مربوط به فرآیند را کنترل کند، وجود ندارد بلکه فرآیند کنترل بین چند کنترلکننده توزیع شده به صورتی که هر جزء فرآیند توسط یک یا چند کنترلکننده، کنترل میشود. بین این کنترلکنندهها لینکهای مخابراتی وجود دارد و هر یک توسط کنترل کننده سطح بالاتر، مونیتور میشود. معمولا برای سیستمهای DCS، ساختار پلهای در نظر گرفته میشود که هر پله، وظیفه کنترلی مشخص و تعریفشدهای را دارا میباشد.
اصولا به هر باسی که تجهیزات داخل سایت را به یکدیگر و یا به سیستم کنترل مرکزی وصل نماید، فیلدباس گفته می شود. در سیستم های FCS یا Field bus control system ، که بر مبنای فیلدباس کار می کنند، انتقال عملیات کنترلی از کنترلکننده مرکزی به کنترلکنندههای داخل سایت و برعکس، به صورت دوسویه و بر روی یک باس انجام می شود. لذا در مقایسه با سیستم DCS که انتقال اطلاعات در آن یک سویه است، دارای حجم سیم کشی کمتری می باشد.
در سیستمهای کنترل امروزی، ارتباط سریع و قابل اطمینان بین اجزاء سیستم از اهمیت به سزایی برخوردار است. به دلیل گسترده بودن این سیستمها، ممکن است بخشهای مختلف سیستم، فاصله مکانی زیادی با یکدیگر داشته باشند و از این رو روشهای انتقال اطلاعات باید به گونهای باشند که هنگام انتقال، اطلاعاتی از بین نرود. به همین دلیل در مسافتهای طولانی از سیگنالهای آنالوگ برای انتقال اطلاعات استفاده نمی شود. بلکه این سیگنالها به سیگنالهای دیجیتال تبدیل شده و با استفاده از برخی پروتکلهای استاندارد منتقل می شوند. از این پروتکلها، میتوان پروتکلهای سری RS، Modbus، Fieldbus، ProfiBus، Ethernet، TCP/IP و… را نام برد.
تهیه فیلم های آموزشی این مبحث: لینک تهیه